


GPS over CAN
I’ve put together pictures of the CAN bus “sniffer” project I made recently. Here is a picture of the “sniffer” hardware implementation, connected to another project that reads data from a GPS module (that small square thing in the lower right corner of the photo).
The basic idea is that the GPS interface board (the green board at the bottom of the picture) is reading data from the GPS module, doing some processing of the data, then forwarding latitude and longitude over the CAN bus to anyone who wants to listen. Someday I’m planning to implement a robot that will use that data to help navigate.
My robotics library contains the “sniffer” demo program (it uses the same hardware as the can_mcp2515 demo) as well as the code I wrote to parse the GPGGA-style sentences from a GPS module like this one.
 It’s that time of year again! The annual Robothon is coming September 21-23 at Seattle Center.
It’s that time of year again! The annual Robothon is coming September 21-23 at Seattle Center. I took a couple of hours today to photograph and document two old minisumo projects: Screech and Velox. You can see the photos
I took a couple of hours today to photograph and document two old minisumo projects: Screech and Velox. You can see the photos  I wasn’t able to get to Portland for this year’s
I wasn’t able to get to Portland for this year’s 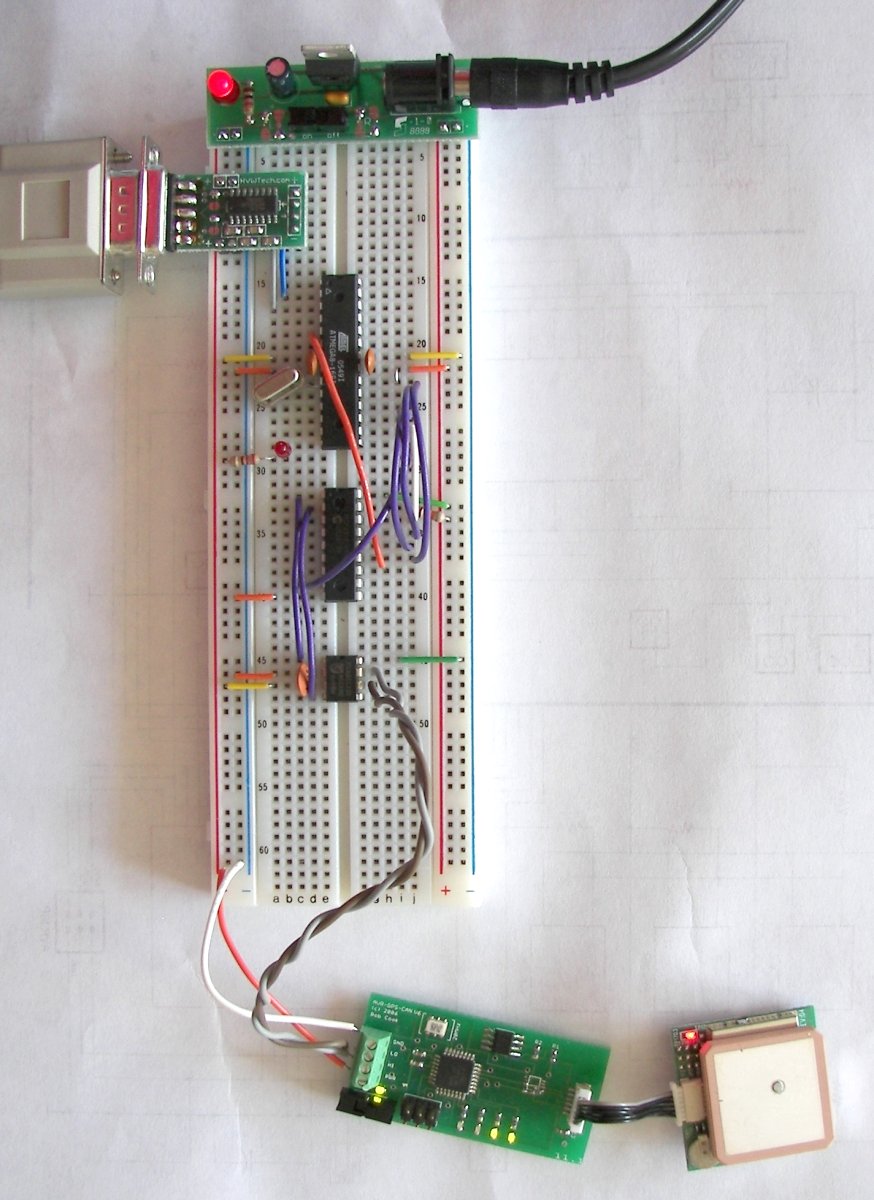{kind=link}