


Motor mount, in aluminum
I have been working, ever so slowly, on a larger wheeled robot. My efforts to date have mostly comprised of collecting parts: motors, wheels, gears, a GPS module, various electronics bits, a nifty digital compass, etc. I’ve finally started design and manufacture of various parts to start stitching together everything.
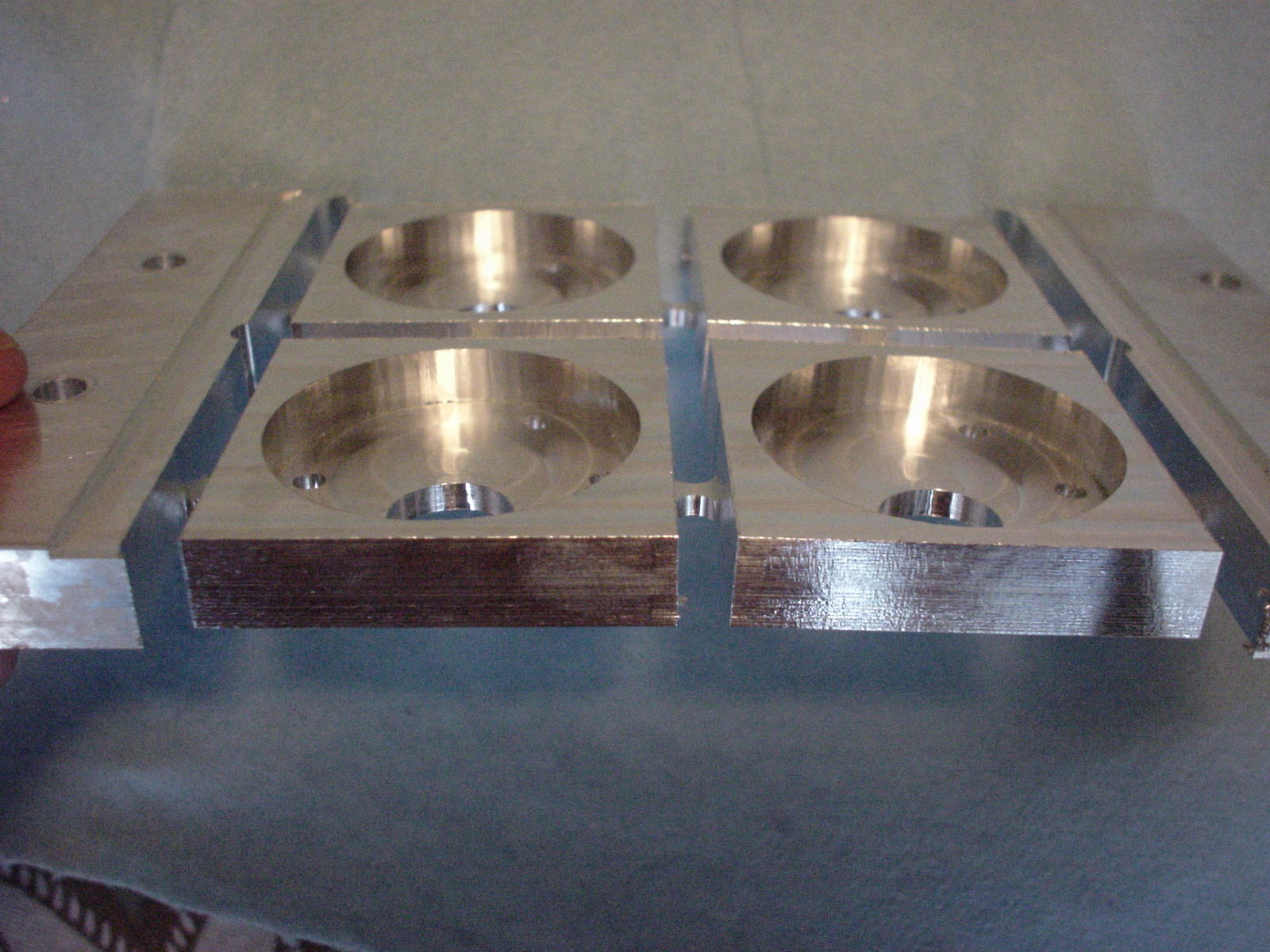
 My first machined part is a bracket to mount the motor (a Lynxmotion model). This picture shows the four brackets I need; one is mounted on a motor, the one in the front-left is finished and the other two need only to have the “tabs” cleaned up.
My first machined part is a bracket to mount the motor (a Lynxmotion model). This picture shows the four brackets I need; one is mounted on a motor, the one in the front-left is finished and the other two need only to have the “tabs” cleaned up.
I designed the part using Inkscape then exported a DXF file and did the machining on my CNC-equipped Sherline (as described in a previous post). You can see the image of the Inkscape design here. This process works quite well for me.
{kind=link}
The problem of course is that the design requires “tabs” between the parts in order to be able to hold the whole thing together while machining. I’ve captured a couple of photos here and here to show what it looked like before I cut everything apart.
{kind=link}
{kind=link}
Next up is the brackets to attach to these mounts. My initial design will take longer to machine though. The idea is to allow each wheel to pivot independently; the bracket is an “L” shape that extends up and over the center of each wheel. It will make more sense when I have some pictures.