


Outdoor Robot Taking Shape
 Between work, the holidays, and moving to a new house I’ve had little opportunity to work on my Robo-Magellan outdoor robot. That changed yesterday where I spent about five hours machining up two base plates for it. My little Sherline mill doesn’t have the working envelope to do the whole thing in one piece, so I decided to create two plates connected together.
Between work, the holidays, and moving to a new house I’ve had little opportunity to work on my Robo-Magellan outdoor robot. That changed yesterday where I spent about five hours machining up two base plates for it. My little Sherline mill doesn’t have the working envelope to do the whole thing in one piece, so I decided to create two plates connected together.
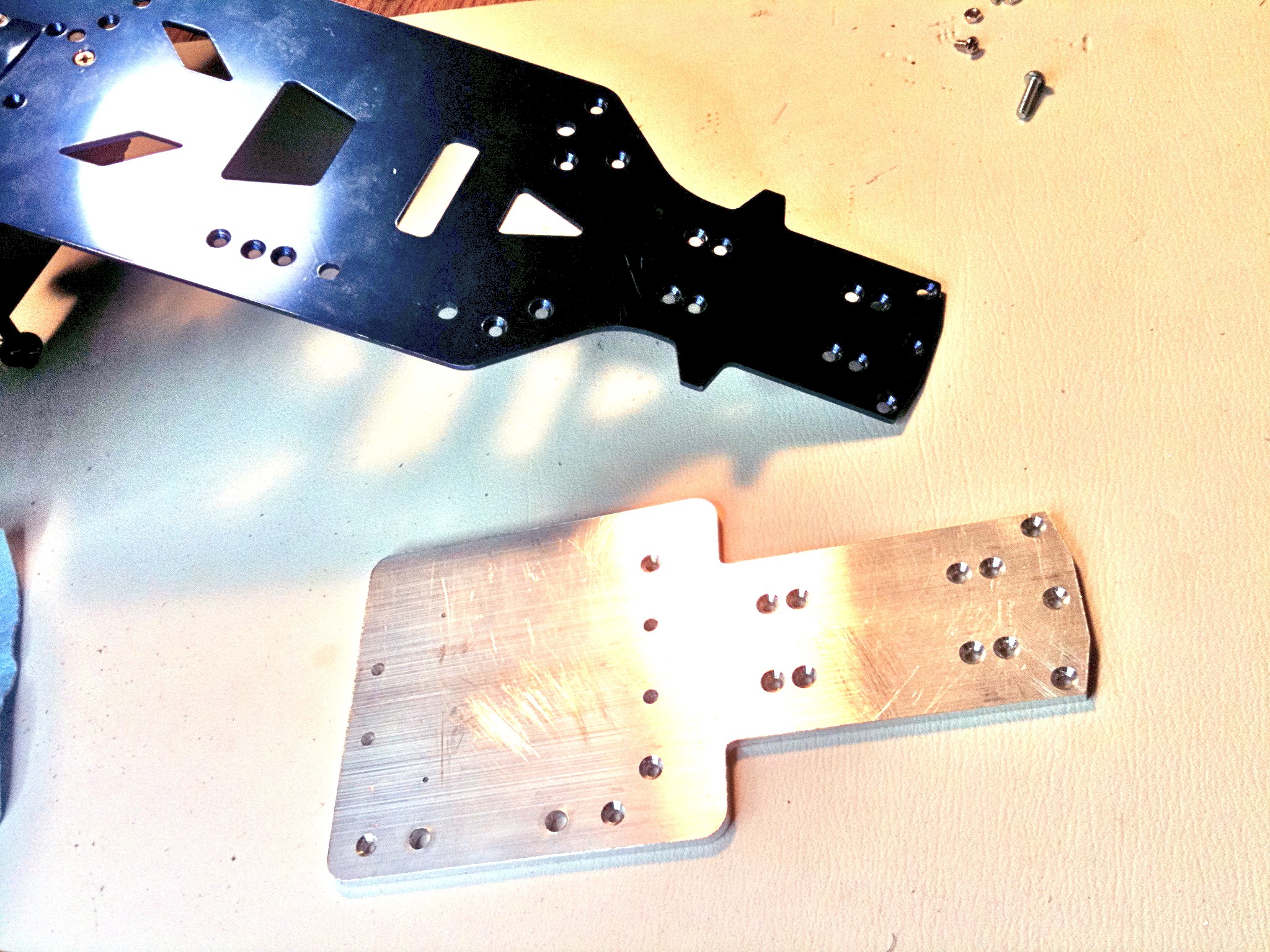
Here is a picture of what each plate looks like after a quick cleanup (with the original base plate from the RC truck included).
{kind=link}
Yesterday’s work produced the two plates, including countersunk holes for some mounting points, just like the original. I’m really happy with the progress made so far, but there is much left to do even to get the mechanical stuff done. Next up will be to make the connecting rods that will form the spine, then to make the motor mounts. Lastly I need to create a new top deck that will hold the electronics and sensors.
As for the brain, I opted for a Gumstix Overo Air module with a Tobi carrier board. This seemed to be a good tradeoff for weight, power consumption, and capability. I also bought a motor controller and servo controller from Pololu.
I need to find a good polymer battery to provide power for everything, hook up some sensors, write some software, etc. but I’m really happy with the progress this weekend.